- ページ 9
コントロールユニット AMS AS5600のPDF マニュアルをオンラインで閲覧またはダウンロードできます。AMS AS5600 14 ページ。 12-bit programmable contactless potentiometer
AMS AS5600 にも: 操作マニュアル (12 ページ), ユーザーマニュアル (13 ページ), 操作マニュアル (10 ページ)
- 1. Table of Contents
- 1. 1 Introduction
- 1. Kit Content
- 2. 2 Board Description
- 3. 3 Software
- 3. Labview
- 3. Using the Arduino IDE
- 3. Installing the Arduino Library
- 3. Reading out the AS5600 Sensor
- 4. 4 AS5600-POTUINO Hardware
- 4. AS5600-POTUINO Schematics
- 4. AS5600-POTUINO PCB Layout
- 5. 5 Ordering & Contact Information
- 6. 6 Copyrights & Disclaimer
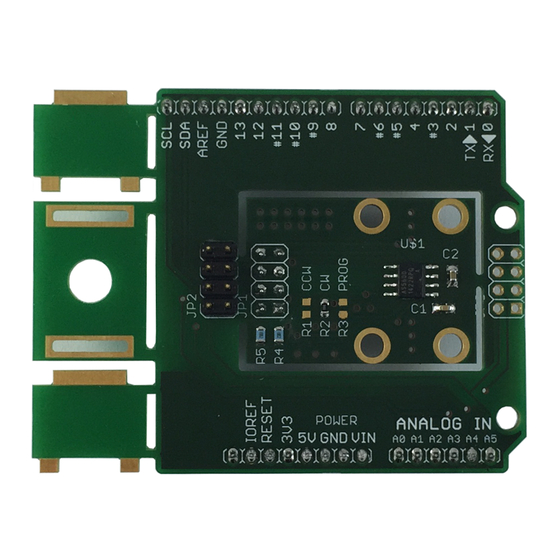
AS5600 Adapter Board
Wire.beginTransmission(AS5600_ADR);
Wire.write(ang_lo);
Wire.endTransmission();
Wire.requestFrom(AS5600_ADR, 1);
while(Wire.available() == 0);
int lo_ang = Wire.read();
//Read Angle High Byte
Wire.beginTransmission(AS5600_ADR);
Wire.write(ang_hi);
Wire.endTransmission();
Wire.requestFrom(AS5600_ADR, 1);
while(Wire.available() == 0);
word hi_ang = Wire.read();
hi_ang = hi_ang << 8;
hi_ang = hi_ang | lo_ang;
//**************************************************
//Read Magnitude High Byte
Wire.beginTransmission(AS5600_ADR);
Wire.write(mag_hi);
Wire.endTransmission();
Wire.requestFrom(AS5600_ADR, 1);
while(Wire.available() == 0);
word hi_mag = Wire.read();
//Read Magnitude Low Byte
Wire.beginTransmission(AS5600_ADR);
Wire.write(mag_lo);
Wire.endTransmission();
Wire.requestFrom(AS5600_ADR, 1);
while(Wire.available() == 0);
word lo_mag = Wire.read();
hi_mag = hi_mag << 8;
hi_mag = hi_mag | lo_mag;
//**************************************************
//Read AGC
Wire.beginTransmission(AS5600_ADR);
Wire.write(agc);
Wire.endTransmission();
Wire.requestFrom(AS5600_ADR, 1);
while(Wire.available() == 0);
int agc_val = Wire.read();
//***************************************************
// Read Status Bits
Wire.beginTransmission(AS5600_ADR);
Wire.write(stat);
Wire.endTransmission();
Wire.requestFrom(AS5600_ADR, 1);
while(Wire.available() == 0);
int stat_val = Wire.read();
stat_val = stat_val & 0xa0;
//Print Values Received
float Raw_Ang = hi_raw *0.0879;
float Ang = hi_ang * 0.0879;
Serial.print("
AS5600 Raw Angle = ");
Serial.print("
Serial.print("
AS5600 Magnitude = ");
Serial.print("
Serial.print("AS5600 Status Bits = ");
Serial.println();
Serial.println();
delay(2000);
}
ams Eval Kit Manual, Confidential
[v1-0] 2015-Jan-21
//Mask off all unnecessary bits
AS5600 Angle = ");
Serial.println(hi_mag, HEX);
AS5600 AGC = ");
Serial.println(agc_val, HEX);
Serial.println(stat_val, BIN);
Serial.println(Raw_Ang, DEC);
Serial.println(Ang, DEC);
Page 9
Document Feedback