Baumer Hubner Berlin HMG 11 Instructions de montage et d'utilisation - Page 21
Parcourez en ligne ou téléchargez le pdf Instructions de montage et d'utilisation pour {nom_de_la_catégorie} Baumer Hubner Berlin HMG 11. Baumer Hubner Berlin HMG 11 36 pages. Absolute encoder ethercat
Également pour Baumer Hubner Berlin HMG 11 : Manuel d'installation et d'utilisation (48 pages), Manuel d'installation et d'utilisation (40 pages), Instructions de montage et d'utilisation (40 pages)
7.1.2
Funktionen
Bus-Protokoll
Geräteprofil
Merkmale
Prozessdaten
Zykluszeiten
Synchronisation
i
Eine ausführliche Anleitung für die
EtherCAT Schnittstelle
Datei
finden Sie auf unserer Internet-
seite www.baumer.com.
MB097c - 11083758
EtherCAT
CoE
(CANopen over EtherCAT)
DSP406
100 MBaud Ethernet
Automatische Adressverga-
be
Distributed-Clock für präzise
Synchronisation. Gerät kann
als „Reference Clock"
konfiguriert werden
Default 10 Byte PDO,
konfigurierbar 4 Byte PDO /
2 Byte PDO für kürzere
Zykluszeiten
Positionswert
Warnings
Systemzeit
Abhängig von Sensortyp,
aktivierte Skalierungsfunk-
tion und PDO-Länge.
Minimale Zykluszeit:
62,5 µs
0x00 Free Run, nicht syn-
chronisiert
0x03 Distributed clocks DC,
synchronsiert mit SYNCO/
SYNC1 Event
und die
Baumer_HMG11-ETH_II_DE-EN (19A1)
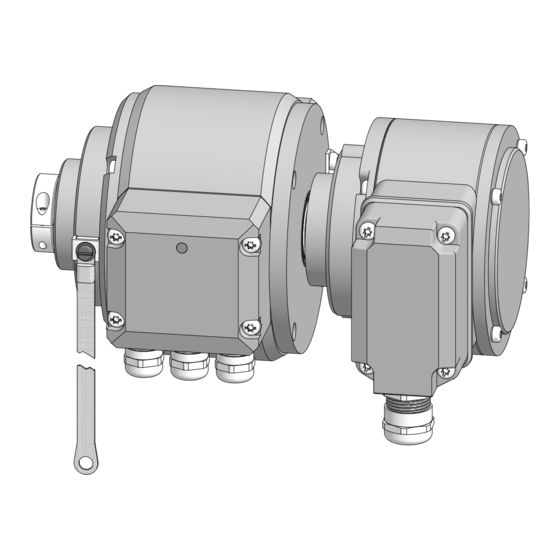
Elektrischer Anschluss / Electrical connection
7.1.2
Functions
Bus-Protokoll
Device profile
Features
Process data
Cycle times
Synchronization
i
Detailed instruction for the
XML-
interface
file XML
www.baumer.com.
Profibus-DP V0
CoE
(CANopen over EtherCAT)
DSP406
100 MBaud Ethernet
Automatic address designa-
tion
Distributed clock for precise
synchronization. Optional
device configuration as
„Reference Clock"
Default 10 byte PDO,
configurable 4 byte PDO / 2
byte PDO for shorter cycle
times
Position value
Warnings
System time
Depending on sensor type,
enabled scaling functionality
and length of PDO.
Minimum cycle time:
62,5 µs
0x00 Free Run, not synchro-
nized
0x03 Distributed clocks DC,
synchronized with SYNCO/
SYNC1 Event
EtherCAT
and the
device description
can be found on our website
7
18