- ページ 16
メディア・コンバーター Baumer HMG 10-SSIのPDF 据付・取扱説明書をオンラインで閲覧またはダウンロードできます。Baumer HMG 10-SSI 36 ページ。 Absolute encoder with magnetic sensing
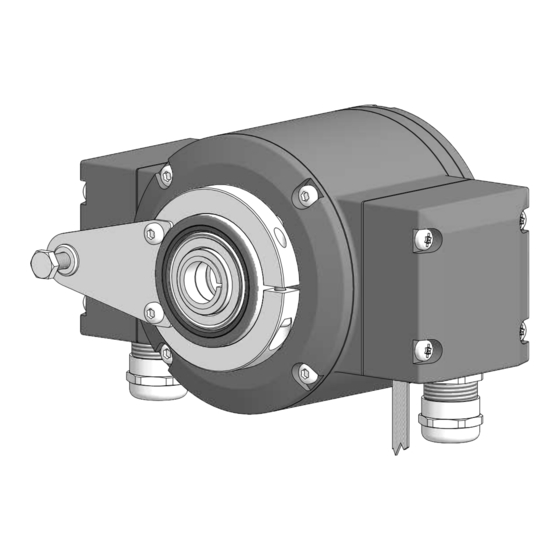
MOUNTING / HOW TO PREVENT MEASUREMENT ERRORS
4.5
How to prevent measurement errors
To ensure that the encoder operates correctly, it is necessary to mount it accurately as
described in section 4�1 to 4�4, which includes correct mounting of the torque arm�
The radial runout of the drive shaft should not exceed 0�2 mm (0�03 mm recommended),
to prevent an angle error�
An angle error may be reduced by increasing the length of L1*� Make sure that the length
L2 of the torque arm, see below, is at least equal to L1**�
The angle error Δρ
Δρ
= ±90°/π · R/L1
mech
with R: Radial runout in mm
L1:
Example:
For R = 0.06 mm and L1 = 69.5 mm the resulting angle error Δρ
i
For more information, call the telephone hotline at +49 (0)30 69003-111
* For this different braces for the torque arm are available on request�
** If L2 < L1, L2 must be used in the calculation formula�
12/32
can be calculated as follows:
mech
Distance of the torque arm to the center point of the encoder in mm
L1
MB244EN - 11171691, 16A3, Baumer_HMG10-SSI_II_EN
equals ±0�025°�
mech