DFRobot DFRduino Romeo-All in one Controller V1.1 Manual - Página 3
Procurar online ou descarregar pdf Manual para Controlador DFRobot DFRduino Romeo-All in one Controller V1.1. DFRobot DFRduino Romeo-All in one Controller V1.1 13 páginas.
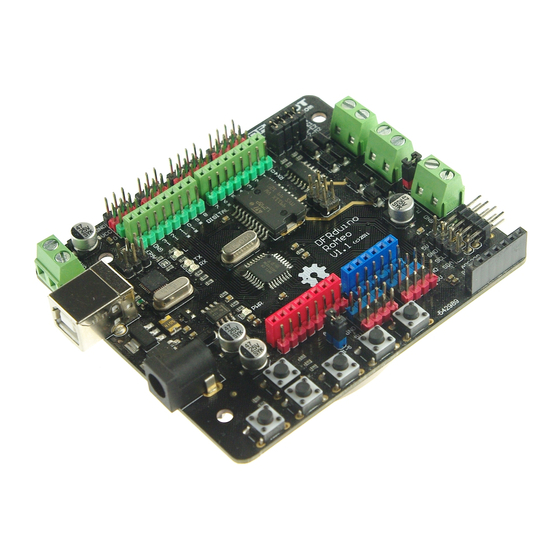
The picture above shows all of the I/O lines and Connectors on the Romeo, which includes:
One Regulated Motor Power Input Terminal (6v to12v)
One Unregulated Servo Power Input Terminal (you supply regulated 4v to 7.2v)
One Servo input power selection jumper
One Serial Interface Module Header for APC220/Bluetooth Module
Two DC Motor Terminals – Handles motor current draw up to 2A, each terminal
One I2C/TWI Port – SDA, SCL, 5V, GND
One Analog Port with 8 analog inputs – Analog input 7 will be occupied when connecting "A7"
jumper
One General Purpose I/O Port with 13 I/O lines – 4,5,6,7 can be used to control motors
One Reset Button
Jumper bank to Enable/Disable Motor Control
Before you start
Applying Power
This is one of the most important steps in getting the Romeo up and communicating with your host
controller. You MUST make sure that you apply power to the Power Terminal using the correct
polarity. Reverse Polarity will damage the Romeo. We are not responsible for such damage, nor do
we warranty against such damage. Make sure you take time to apply power correctly. Otherwise, it
could get costly for you!
Power from USB: Simply plug USB cable, and the Romeo is able to work. Please notice that the
USB can only supply 500 mA current. It should be able to meet the most requirements for LED lit
application. However it is not enough to power DC motors or servo.
Power from Motor Power Input: Simply connect the ground wire from your supply to the screw
terminal labeled "GND", and then connect the positive wire from your supply to the screw terminal
labeled "VIN".
NOTE: Maximum supply voltage cannot exceed 14V DC.
Software
RoMeo can be programmed by Arduino IDE 0022 and above. It can be downloaded at Arduino.cc,
Please select "Arduino UNO" as the hardware.
Romeo Configuration
Servo Power Select Jumper
As most servos draw more current than the USB power source can supply. A separate servo power
terminal is provided to power the servo individually. This option can be Enabled/Disabled by the
Servo Power Select Jumper.
When the Servo Power Select Jumper is applied, the servo is powered by internal 5V.
When the Servo Power Select Jumper is not applied, the servo is powered by external power
source.