AstroLink 4 Pi Руководство - Страница 2
Просмотреть онлайн или скачать pdf Руководство для Приводы постоянного тока AstroLink 4 Pi. AstroLink 4 Pi 17 страниц.
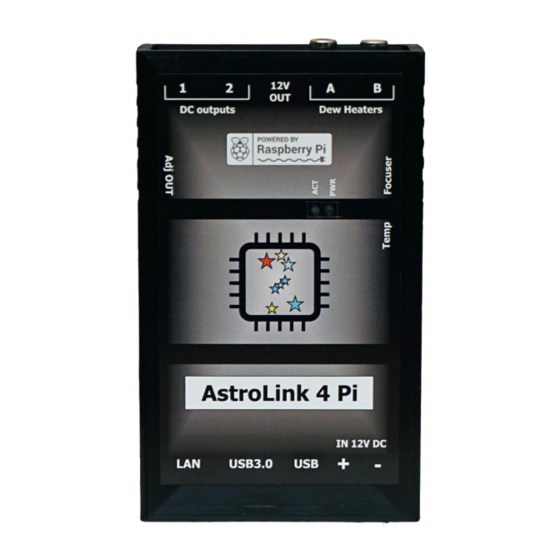
Main features:
•
*
Raspberry Pi
4 based astroimaging control center
•
dedicated AstroLink 4 Pi INDI driver
•
focuser motor control for Robofocus, Moonlite, or generic unipolar or bipolar stepper motor
•
up to 1/32 micro-stepping control with 2.0A maximum current and 1.4A maximum
continuous hold current
•
DS1820 temperature sensor input
•
permanent focuser position – no need to park focuser after the session
•
2 adjustable PWM power outputs to control dew heaters, telescope fans, or custom Peltier
coolers. The maximum load is 40W per output
•
2 switchable power outputs to power mount, cameras, or filter wheels. The maximum load is
5A per output
•
1 additional permanent power output
•
1 additional adjustable 3-10V output
•
XT60 high current input voltage socket
Technical data
•
dimensions: 137x83x32mm
•
weight: 160g
•
the maximum current drawn from all outputs: 10A
•
AstroLink power consumption: 6W max
•
regulated PWM outputs: 40W max
•
permanent 12V DC output: 5A max
•
switchable 12V DC outputs: 5A max
•
focuser stepper motor outputs: RJ12 6 pin, 2.0A max
•
adjustable output: 2A maximum peak load, 1.5A continuous load
•
sensor inputs: Jack 3.5mm
Do not connect or disconnect stepper motor when power is on. It may
damage stepper motor controller.
Make sure the stepper hold torque is set to 0% before replacing stepper
motor with motor of different type.
Do not cover ventilation slits at the enclosure sides and back.
*
Raspberry Pi is a trademark of Raspberry Pi Trading
Rev. 1.0
AstroLink 4 Pi manual - astrojolo.com
WARNING!
2