AstroLink 4 Pi Handbuch - Seite 3
Blättern Sie online oder laden Sie pdf Handbuch für DC-Antriebe AstroLink 4 Pi herunter. AstroLink 4 Pi 17 Seiten.
AstroLink 4 Pi manual - astrojolo.com
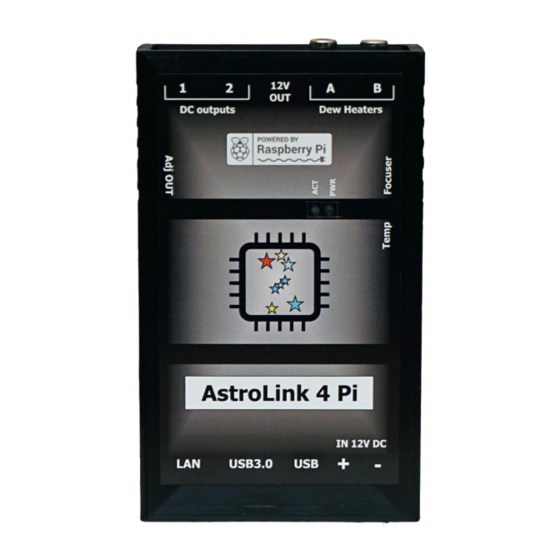
Device overview
System and hardware requirements
*
AstroLink 4 Pi requires a Raspberry Pi
4 module to be installed. Module with 4GB of RAM is
recommended. AstroLink 4 Pi has been designed to work under the control of the dedicated
AstroLink 4 Pi INDI driver, which is available at
https://github.com/astrojolo/astrolink4pi
. Astroberry
system is recommended, however any working Linux distribution that supports INDI drivers system
will work. Good quality 32GB card is recommended (Class 10 at least). Most of the Raspberry
*
Pi
problems come from a poor quality power supply or SD card.
PWM outputs
AstroLink 4 Pi has two RCA outputs that provide PWM (pulse width modulation) regulated voltage.
Regulations cover the full 0-100% range. These outputs are usually used for powering dew cap
rd
heaters. Output can be regulated using both controls in the dedicated INDI driver panel and 3
party
software that supports the INDI interface. PWM cycle period can be set in the INDI driver options in
the range 50-1000ms. Default output value at the connection moment can be defined.
Switchable 12V DC outputs
The device contains two switchable DC outputs, that may provide a supply voltage for imaging setup
components (camera, mount, etc). Output can be switched using both controls in the dedicated INDI
rd
driver panel and 3
party software that supports the INDI interface. Default output value at the
connection moment can be defined.
Focusing motors control
The focusing motor can be controlled with AstroLink 4 Pi device. The focusing stepper motor can be
connected to the 6 pins RJ12 socket (see Figure 5). It supports 12V unipolar motors with gearboxes
and bipolar motors at any microstepping resolution in a range of full step to 1/32. The focusing
motor can be controlled with a dedicated INDI driver panel and via INDI interfaces. Depending on the
AstroLink 4 Pi revision, the stepper motor current is adjusted with a potentiometer, or in the INDI
control panel. Setting holding power is also possible. For unipolar geared motors it is highly
recommended to set holding power to zero, so the motor will not overheat. Setting 1/8 or 1/16
resolution for the unipolar motor is recommended, so the motor movement is smooth.
Permanent 12V DC output
This output is connected directly to the input 12V XT60 socket. Can be used to provide power to a
mini PC or any other device powered with 12V.
Adjustable DC output
Internal switching converter provides regulated voltage in a 3-10V range that can be used to power
any peripheral devices (DSLR, USB hub, etc.) Voltage can be adjusted with a 2mm flat screwdriver
using a small potentiometer.
Sensors
AstroLink 4 Pi can be equipped with a DS1820 temperature sensor to monitor external conditions.
The temperature reading is available in the dedicated INDI driver panel and can be used to perform
temperature compensation of the focuser position.
*
Raspberry Pi is a trademark of Raspberry Pi Trading
3
Rev. 1.0